
lgg5《lgg5手机参数》
36
2022-09-22
西门子SITOP电源模块6EP1336-3BA10
主控系统由霍尼威尔的PKS系统和变频器组成,变频器的两地转换、开停、故障、复位等信号集中上位机进行操纵和监控
200V-240V ±10%,单相/三相,交流,0.12kW-45kW;
380V-480V±10%,三相,交流,0.37kW-250kW;
矢量控制方式,可构成闭环矢量控制,闭环转矩控制;
高过载能力,内置制动单元;
三组参数切换功能。
控制功能
线性v/f控制,平方v/f控制,可编程多点设定v/f控制,磁通电流控制免测速矢量控制,闭环矢量控制,闭环转矩控制,节能控制模式;
标准参数结构,标准调试软件;
数字量输入6个,模拟量输入2个,模拟量输出2个,继电器输出3个;
独立I/O端子板,方便维护;
采用BiCo技术,实现I/O端口自由连接;
内置PID控制器,参数自整定;
集成RS485通讯接口,可选PROFIBUS-DP/Device-Net通讯模块;
具有15个固定频率,4个跳转频率,可编程;
可实现主/从控制及力矩控制方式;
在电源消失或故障时具有自动再起动功能;
灵活的斜坡函数发生器,带有起始段和结束段的平滑特性;
快速电流限制(FCL),防止运行中不应有的跳闸;
有直流制动和复合制动方式提高制动性能。
保护功能
西门子6SE6440-2UE32-2DA1
V90 PTI 固件版本 1.05 以上开始,伺服驱动器提供了 Modbus RTU 通信功能。PLC可以通过Modbus的FC3及 FC6功能代码读取或写入伺服驱动的寄存器,S7-1200可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。1. 通信连接
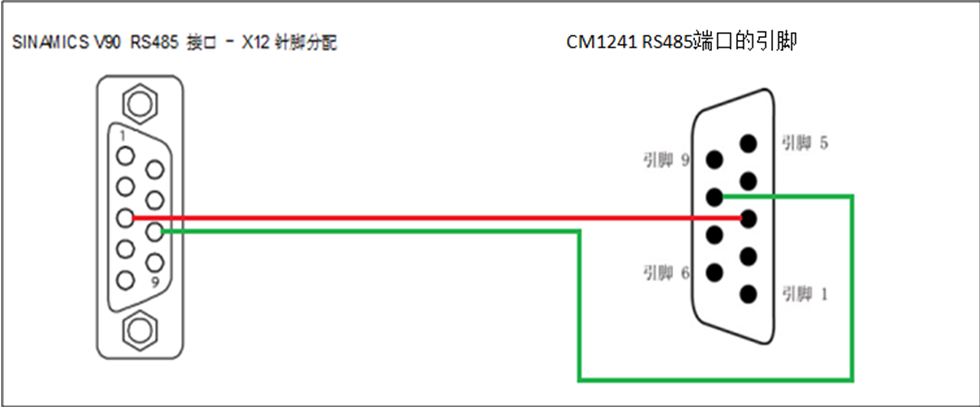
V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485 端口进行通讯。
 2. 通过 Modbus 通信实现 V90 内部位置控制的 MDI 功能控制
2. 通过 Modbus 通信实现 V90 内部位置控制的 MDI 功能控制
(1) V90 Modbus 寄存器说明
对于不同固件版本V90 PTI,内部控制的控制数据寄存器是不同的。
对于FW V1.07及后续版本:
对于FW V1.07以前版本:
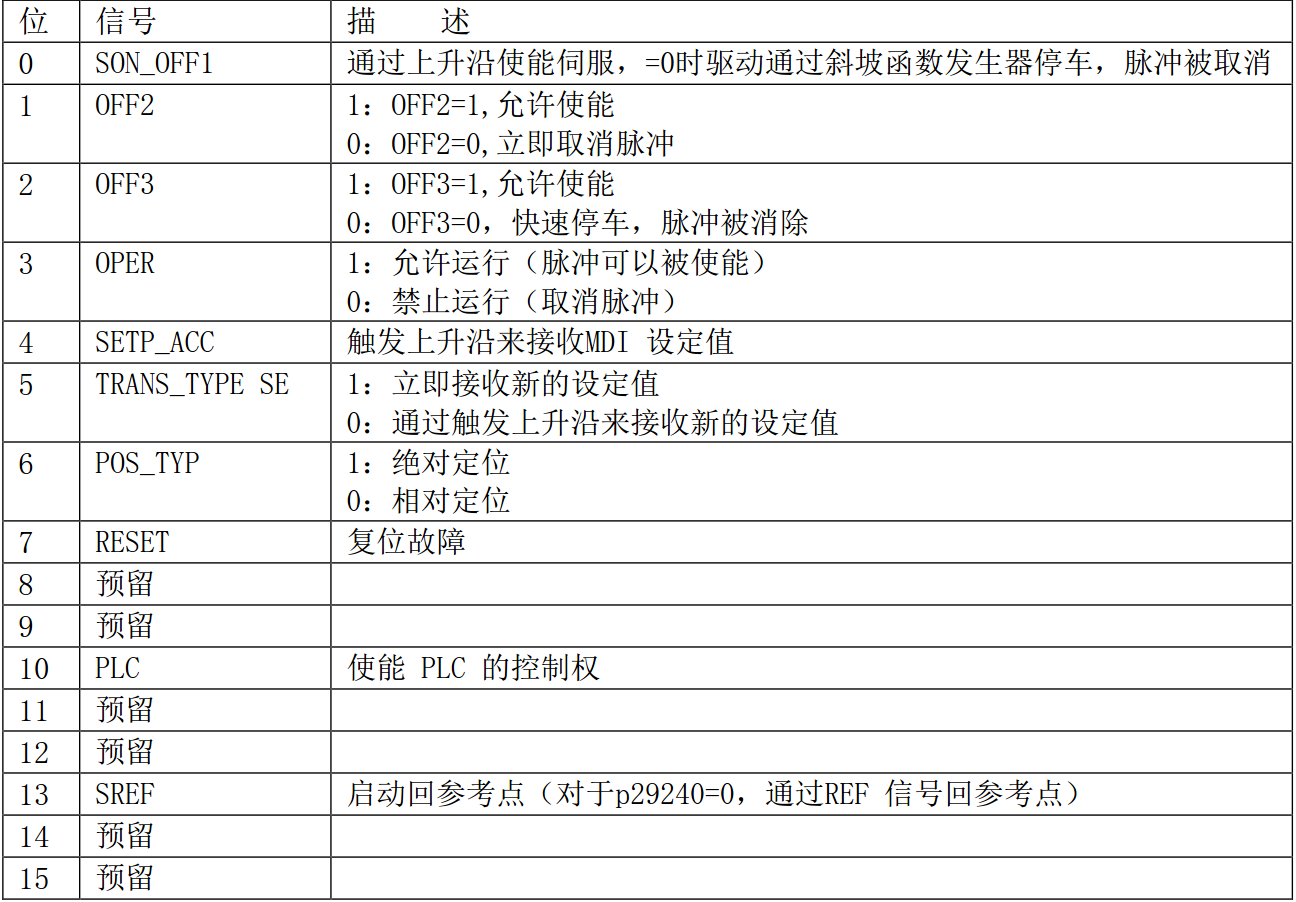
IPOS控制模式寄存器 40100控制字的定义:
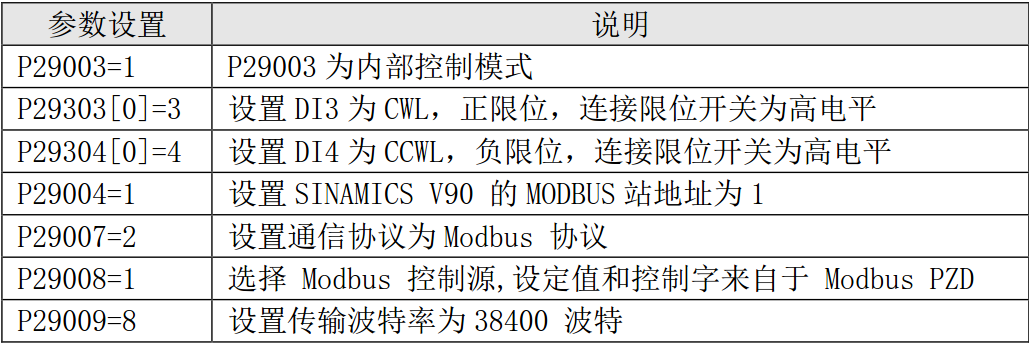
3. V90参数设置
按照下表设置伺服驱动器的相关参数:
4. PLC 的指令说明
博途中为S7-1200的MODBUS通信提供了MODBUS(RTU)V3.0的指令库。
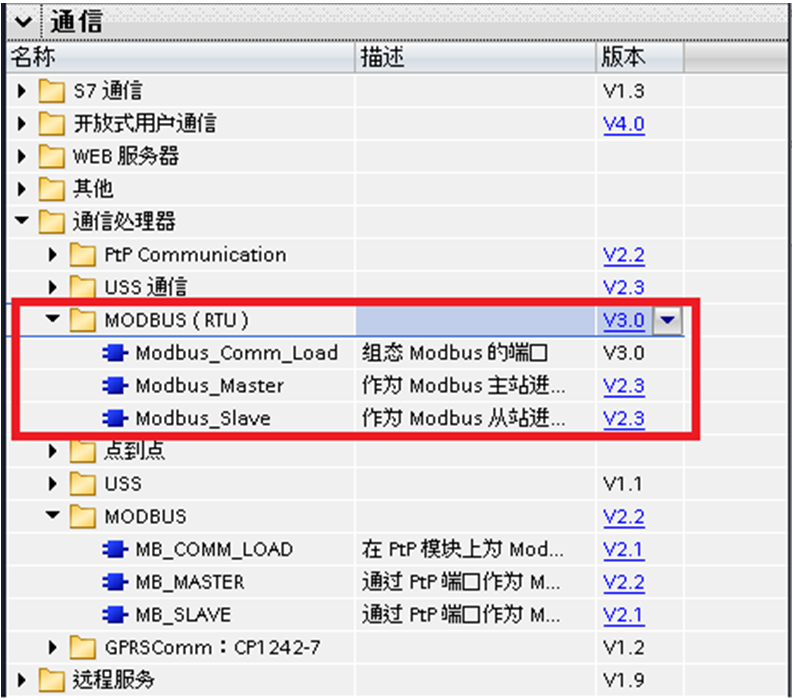
MODBUS(RTU)V3.0 指令库在满足以下条件时可以使用:S7-1200 CPU 硬件版本>=V4(订货号:6ES721x-1xx40-0XB0) ,并且:(1) 使用 CB 1241 RS485 (订货号: 6ES7241-1CH30-1XB0)时,S7-1200 CPU 固件版本 >= V4.1.1。(2) 使用 CM 1241 RS422/485 (订货号: 6ES7241-1CH32-0XB0)时, CM 1241 固件版本 >= V2.1。(3) 使用 CM 1241 RS232 (订货号: 6ES7241-1AH32-0XB0)时, CM 1241 固件版本 >= V2.1。满足以上条件时,也可使用 MODBUS V2.2 的指令库。但当以上条件不满足时,只能使用 MODBUS V2.2 的指令。"MB_COMM_LOAD"指令用于组态端口使用 Modbus RTU 协议来通信。组态该端口后,可通过执行"MB_SLAVE"或"MB_MASTER"指令以通过 Modbus 进行通信。"MB_COMM_LOAD"只需被调用一次,就可修改某个通信参数,每次调用会删除通信缓冲区中的内容。为避免通信期间数据丢失,应避免不必要地调用该指令。插入"MB_MASTER"或"MB_SLAVE"指令时,将背景数据块。当在"MB_COMM_LOAD"指令中MB_DB 参数时,将引用该背景数据块


发表评论
暂时没有评论,来抢沙发吧~