
Win11限制宽带流量教程分享
33
2022-05-11
流量比例阀2WFCE40S500L-1X/M/24G1源头拿货
比例阀的输出流量与气体性质,有效通气面积,阀门前后两端的气压压差有关,中通过比例阀的气体绝大部分为氧气和空气( N 2 , O 2 N_2,O_2 N2,O2),均为双原子气体分子,气体动力学性质基本相同,在模型中可以不用考虑气体自身性质的影响
比例阀流量控制测试方法
比例阀的驱动脉冲信号的占空比对应程序中的一个数字量(PWM比较寄存器值),通过控制这个数字量就能够控制比例阀的输入端口电流,从而控制流量。将的吸气管道接到PF300,同时将呼气管堵住,然后接入氧气源(氧气瓶)。使用仿真器连接控制器通过在线仿真的方式,实时给定对应PWM模块的比较寄存器值,记录比较寄存器的值和PF300以及内部测量得到的流量数据等。
例阀驱动电路,驱动电路的输入为来自控制芯片的使能信号和PWM脉冲信号。通过控制PWM脉冲的占空比就可以控制比例阀端口的驱动电流,从而达到控制流量的目的。.开关控制:要么全开、要么全关,流量要么最大、要么最小,没有中间状态,如普通的电磁直通阀、电磁换向阀、电液换向阀。
2.连续控制:阀口可以根据需要打开任意一个开度,由此控制通过流量的大小,这类阀有手动控制的,如节流阀,也有电控的,如比例阀、伺服阀。在先导型溢流阀发出的噪声中,有时会有机械性的高频振动声,一般称它为自激振动声。这是主阀和导阀因高频振动而发生的声音。它的发生率与回油管道的配置、流量、压力、油温(粘度)等因素有关。一般情况下,管道口径小、流量少、压力高、油液粘度低,自激振动发生率就高 在先导型溢流阀发出的噪声中,有时会有机械性的高频振动声,一般称它为自激振动声。这是主阀和导阀因高频振动而发生的声音。它的发生率与回油管道的配置、流量、压力、油温(粘度)等因素有关。一般情况下,管道口径小、流量少、压力高、油液粘度低,自激振动发生率就高。
应建立新油是脏油'的 概念,如果在油箱中注入10%以上的新油液,即应换上冲洗板,启动油源,清洗24小时以上,然后更换或清洗滤油器,再卸下冲洗板,换上伺服阀。一 般情况下,长时间经滤器连续使用的液压油往往比较干净。因此,在系统无渗漏的情况下应减少无谓的加油次数,避免再次污染系统。Moog伺服阀维修加强对伺服阀的管理:由于伺服阀的规格型号较多,要根据机组DEH系统要求,选用合适的伺服阀,尽量选用原机组中同规格型号的伺服阀;伺服阀在工作一定时间后,要定期利用试验设备进行检测,普通的冲洗台尽管也可以冲洗堵塞的伺服阀,但不能对伺服阀的性能进行定量的分析,不能判断伺服阀的性能指标是否能满足运行要求,也不能解决伺服阀的其它故障,通过的试验设备对同服阀的性能参数的调整及清洗,使伺服阀始终处于工作状态,防止伺服阀突发事故,不但可以延长伺服阀的使用寿命,还可防患于未然伺服阀在使用过程中出现堵塞等故障现象,不具备专业知识及设备的使用者不得擅自分解伺服阀,用户可按说明书的规定更换滤器。如故障还无法排除,应返回生产单位进行修理、排障、调整。Rexroth比例阀维修综上描述,液压控制阀分为流量控制阀和压力控制阀。流量控制阀又分为单向阀,节流阀,调速阀,分流集流阀等等。压力控制阀又分为减压阀,平衡阀等等
流量比例阀2WFCE40S500L-1X/M/24G1源头拿货
2WFCE 32 S320L-1X/M/24A1
2WFCE 32 S320L-1X/M/24B1
2WFCE 32 S320L-1X/M/24G1
2WFCE 32 S320L-1X/V/24B1
2WFCE 32 S320L-1X/V/24G1
2WFCE 32 S650L-1X/M/24A1
2WFCE 32 S650L-1X/M/24B1
2WFCE 32 S650L-1X/M/24G1
2WFCE 40 S500L-1X/M/24A1
2WFCE 40 S500L-1X/M/24B1
2WFCE 50 S1500L-1X/M/24G1
2WFCE 50 S1500L-1X/M/24B1
2WFCE 50 S1500L-1X/M/24A1
2WFCE 50 S1000L-1X/V/24G1
2WFCE 50 S1000L-1X/V/24B1
2WFCE 50 S1000L-1X/M/24G1
2WFCE 50 S1000L-1X/M/24B1
2WFCE 50 S1000L-1X/M/24A1
从理论模型中可以知道,流过比例阀的流量还与比例阀两端的气压差有关,由于实际使用中比例阀出口端的压力相较于入口端的压力很小,因此出口端的压力变化可以忽略,仅考虑入口端的气源压力的影响。下图是在不同气源压力下进行测试得到数据绘制的曲线(仅考虑阀由闭到开的过程)。从图中可以看出,在气源压力不同时,流量随驱动信号占空比变化曲线的偏移是很小的。这可能与气源压力的变化范围,流量变化范围比较小有关。 考虑到实际测试中在一般使用范围内,气源压力对流量控制的影响较小,可以选择一个实际应用中气源压力的典型值400kpa,来拟合得到驱动信号占空比与流量之间的关系。通过线性拟合,可以得到驱动信号占空比和流量之间的关系比例阀模型在控制中的应用
1. 在流量控制闭环中引入前馈量
在得到了占空比与流量的关系之后,可以根据目标流量值反推出控制器应该给出的控制信号占空比。将该控制量作为流量控制环路的前馈项,可以提高系统的动态响应性能,降低对PI控制器的带宽要求和饱和风险,提高控制稳定性。引入前馈项后的比例阀控制框图如下图所示:
前馈控制用于确定基本的控制量级别,来得快且直接,反馈控制用于误差修正,能确保稳和准,两者配合则可获得各自优点。如果前馈控制做得足够准的话,反馈控制是可以去掉的,但是实际很少这样做,因为系统是不断变化的,需要反馈保证稳定性。
将实验得到的比例阀的模型,带入到上述流量控制系统中,同时考虑实际控制中的延时环节,可以得到流量反馈控制的传递函数模型。根据模型,按照所需要的流量控制带宽和相角裕度,可以计算出PI控制器的参数值。据系统的动态响应速度,超调量与稳定性要求给出需要的控制带宽 f c f_c fc 和相角裕度 M M M 。
根据开环传函在截止频率处的模值为1,以及相角裕度的定义列出如下方程:
{ ∥ G o p ( 2 π f c i ) ∥ = 1 ∠ G o p ( 2 π f c i ) + 180 = M
{∥Gop(2πfci)∥=1∠Gop(2πfci)+180=M
根据上述方程求解出PI控制器中的 k p k_p kp , k i k_i ki 参数。
PI参数离散化,增量式PI控制器的表达式如下:
KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ u(k) &=u(k-1)…
其中 u ( k ) u(k) u(k) 表示k时刻的控制器输出, e ( k ) e(k) e(k) 表示k时刻的给定和反馈之间的误差。离散化后的系数和PI参数有如下关系:
KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ \alpha &= k_p …
其中Ts为控制周期。验算,测试。这是根据NNP所用比例阀测试数据,选择控制带宽50hz,相角裕度80度计算得到PI参数后,做出比例阀流量控制系统的闭环传递函数波特图以及阶跃响应曲线。从波特图可以看出闭环控制带宽为50hz,从系统阶跃响应可以看出系统的上升时间为7ms,超调小于10%.
流量比例阀2WFCE40S500L-1X/M/24G1源头拿货
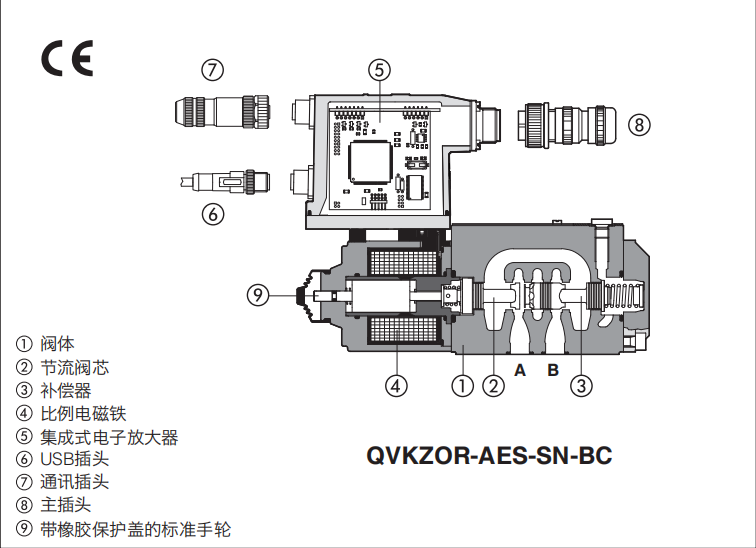
带集成电子元件 (OBE) 或外部控制电子元件的先导式比例方向插装阀
2WFC; 2WFCE
规格 16, 25, 32, 40, 50
组件系列 1X
工作压力 420 bar
流量 1500 l/min
CE 符合 EMC 指令 2014/30/EU
流量比例阀2WFCE40S500L-1X/M/24G1源头拿货
发表评论
暂时没有评论,来抢沙发吧~